MPU-6050 көмегімен өнімділікті оңтайландыру: Орнату, калибрлеу және қосымшалар
2024-04-25
9238
MPU-6050 Бұл әлемдегі алғашқы интеграцияланған, ол 3 осьтің гироскопын, 3 осьтік акселерометрді және масштабталатын сандық қозғалыс процессорын (DMP) біріктіреді.Оны қолданудың мақсаты - өлшенетін объектінің көлбеу бұрышы (мысалы, квадкоптер, теңдестіру машинасы, теңдестіру машинасы), яғни, бұл, яғни бұрыш, орам бұрышы және жоқа бұрышы.Біз I2C интерфейсі арқылы MPU-6050 (үш осьті үдеткіш жарнамалық жарнама және үш осьті үгіт-насихат »жарнамалық мәнін оқыдық.Фузияны өңдеуден кейін, алаң, орама және жо бұрыштарын есептеуге болады.Өлшеу мәндерінің бағыты ретінде сенсордың координаторлық бағытының анықтамасы төмендегі суретте көрсетілгендей, ол оң қолмен координаталар жүйесі принципі бойынша көрсетілген (яғни x- оң бағыты)Ось, саусақ саусақ Y-осьтің оң бағытына және ортаңғы саусақ Z-осьтің оң бағытына нұсқайды. Бағыт).
Каталог

Өзіне арналған I2C сенсорлық автобуспен MPU-6050 тікелей 3 осьтік компас компаста кіре алады, бұл толық 9-осьті MotionFusefuse ™.Бұл сәйкессіздік мәселесін біріктірілген гироскоп пен үдеткіш уақыт кестесі арасында жояды және көп компоненттермен салыстырғанда орау кеңістігін едәуір азайтады.Үш осьтік магнитометрге қосылған кезде MPU-60x0 өзінің негізгі I2C немесе SPI портына 9-осьтің толық қосылуын қамтамасыз ете алады (SPI порты тек MPU-6000).
Балама нұсқалар мен олардың баламалары
- MPU-3300
- MPU-6000
- MPU-6500
MPU-6050 өндірушісі
MPU-6050 өндірушісі - TDK.TDK екі негізін қалаушымен, доктор Йогоро Коо және Поэти Чати Токиода феррит ойлап тапты, олар Токио Денкикаку Когё К.К.1935 жылы «Электроника» жаһандық бренді ретінде TDK әрдайым электронды шикізат және электрондық бөлшектер салаларында басым орынды сақтап келеді.TDK-тың жан-жақты және инновациялық портфолиосы, мысалы, керамикалық конденсаторлар, алюминий электролитикалық конденсаторлар, кино конденсаторлары, магниттік өнімдер, жоғары жиілікті компоненттер, пьезоэлектрлік және қорғаныс құралдары, сондай-ақ сенсорлар мен сенсорлық жүйелер (температура мен қысым сияқты)Бұдан басқа, магниттік және мемсикалық датчиктер), сонымен қатар TDK сонымен қатар электрмен жабдықтау және энергия құрылғыларын, магниттік бастарды және басқа да өнімдерді ұсынады.Оның өнім брендтеріне TDK, EPCOS, Invense, Microlas, троникалар және TDK-Lambda кіреді.
MPU-6050 ішкі блок-схемасы
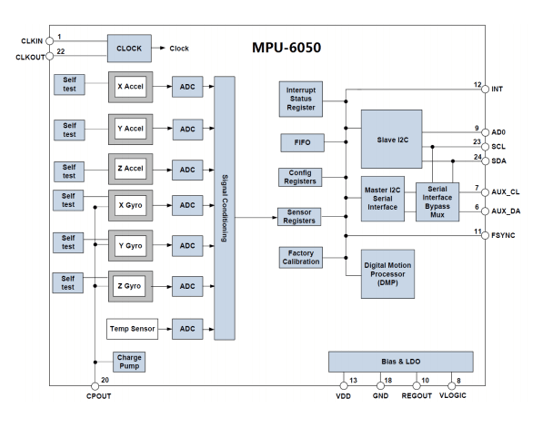
Олардың ішінде SCL және SDA - МКУ-ға байланысты IIC интерфейстері, ал МКҰ осы ИК интерфейсі арқылы MPU-6050 басқарады.Сондай-ақ, IIC интерфейсі, атап айтқанда AUX_CL және AUX_DA бар.Бұл интерфейсті «Магниттік сенсорлар» сияқты сыртқы құлдық құрылғыларды, мысалы, тоғыз ось даторын қалыптастыру үшін пайдалануға болады.VLOGIC - бұл IO портының кернеуі.Бұл PIN коды ең аз дегенде 1,8V.Біз оны әдетте тікелей VDD-ге қосамыз.AD0 - бұл құлдық IIC интерфейсінің мекен-жайды басқару пышағы (MCU-ға қосылған).Бұл PIN коды IIM мекенжайын ең төменгі битін басқарады.Егер ол GND-ге қосылған болса, MPU-6050 IIC мекенжайы - 0x68;Егер ол VDD-ге қосылған болса, ол 0x69.Мұндағы мекен-жайға деректерді берудің ең төменгі битін қамтымайтындығын ескеріңіз (ең төменгі бит).MWBALERTENTSC15, AD0 GND-ге қосылған, сондықтан MPU-6050 IIC мекенжайы 0x68 (ең төменгі бит қоспағанда).
IIC интерфейсін баптаңыз
MPU-6050 IIC-ті STC15-пен байланысу үшін қолданады, сондықтан біз SDA және SCL-дің MPU-6050-ге қосылған SDA және SCL деректер желілерін бірінші болып баптауымыз керек.
MPU-6050 қалпына келтіріңіз
Бұл қадам MPU-6050 ішіндегі барлық регистрлерді қалпына келтіреді, ол 1-ші (0x6b) қуатты басқарудың битіне 1-битпен жазып, қол жеткізілетін әдепкі мәндеріне қалпына келеді.Қайтарылғаннан кейін, қуатты басқару 1 тіркелімі әдепкі мәнге (0x40) қалпына келтіріледі, ал бұл регистрден кейін MPU-6050-ге ояну және оны қалыпты жұмыс күйіне қою керек.
Бұрыштық жылдамдық сенсорының толық масштабты диапазонын (GYRO) және үдеткіш сенсорын орнатыңыз
Бұл қадамда біз екі датчиктің толық масштабты диапазонын (FSR) гироскопты теңшелім регистрі (0x1b) және жеделдету сенсорының конфигурациясы регистрі (0x1c) арқылы орнатамыз.Әдетте, біз гироскоптың толық ауқымын ± 2000dSPS және акселерометрдің толық масштабты диапазонын ± 2 г дейін орнатамыз.
Басқа параметрлерді орнатыңыз
Міне, біз келесі параметрлерді теңшеуіміз керек: үзілістерді өшіріп, AUX I2C интерфейсін өшіріңіз, AIR I2C интерфейсін өшіріңіз, Gyroscope сынамасының жылдамдығын орнатыңыз және сандық төменірек сүзгіні (DLPF) теңшеңіз.Осы тарауда деректерді оқу үшін үзілістерді пайдаланбағандықтан, үзіліс функциясын өшіру керек.Сонымен бірге, біз басқа сыртқы сенсорларды қосу үшін AUX I2C интерфейсін қолданбағандықтан, біз де осы интерфейсті жабуымыз керек.Бұл функцияларды Үзіліс қосу (0x38) және пайдаланушы бақылау тізімі (0x6а) арқылы басқаруға болады.MPU-6050 FITO-ны сенсор туралы деректерді сақтау үшін пайдалана алады, бірақ біз оны осы тарауда қолданған жоқпыз, сондықтан барлық FIFO арналары жабылуы керек.Мұны FIFO арқылы басқаруға болады (0x23).Әдепкі бойынша, осы регистрдің мәні 0 (яғни FIFO ажыратылған), сондықтан біз әдепкі мәнді тікелей қолдана аламыз.Гироскоптың іріктеу жылдамдығы сынама мөлшерлемелерінің тізілімімен (0x19) бақыланады.Әдетте, біз бұл іріктеу жылдамдығын 50-ге орнатамызЖалпы алғанда, біз DLPF-ті DLPF-ті деректердің дәлдігін және жауап беру жылдамдығын балансты жартысына дейін орнатамыз.
Жүйе сағаттарының көзін конфигурациялаңыз және бұрыштық жылдамдық сенсорын және үдеткіш сенсорын қосыңыз
Жүйе сағаттарының параметрі Power Management 1 тіркелгісіне байланысты (0x6b), мұнда осы регистрдің ең төменгі үш беті сағаттық көздің таңдауын анықтайды.Әдепкі бойынша, бұл үш бие 0-ге орнатылады, яғни жүйе ішкі 8MHZ RC Oscillator-ді сағат көзі ретінде пайдаланады.Алайда, сағат дәлдігін жақсарту үшін біз оны көбінесе 1-ге орнатып, сағат көзі ретінде x осьтік гироскопты таңдаңыз.Сонымен қатар, бұрыштық жылдамдық сенсорын және үдеткіш сенсорын қосу сонымен қатар инициализация процесінде маңызды қадам болып табылады.Екі операция да 2 (0x6c) қуатты басқару арқылы жүзеге асырылады.Сәйкес датчикті іске қосу үшін сәйкес битке 0-ге қойыңыз.Жоғарыдағы қадамдарды орындағаннан кейін MPU-6050 қалыпты жұмыс күйін енгізе алады.Арнайы орнатылмаған регистрлер жүйенің алдын ала орнатылған әдепкі мәндерін қабылдайды.
MPU-6050 қалай жұмыс істейді?
Гиро сенсор
Сенсор гирроспен жабдықталған, ол әрдайым гироскопиялық әсерге байланысты бастапқы бағытқа параллель болады.Сондықтан, біз гирроның ауытқуын бастапқы бағытта анықтау арқылы айналу бағыты мен бұрышын есептей аламыз.
Акселерометр сенсоры
Acceleromom датчигі - бұл үдеуді өлшейтін және пьезоэлектрлік эффект принципіне сүйене отырып жұмыс істейді.Презерация кезінде сенсор жаппай блокқа қолданылатын инерциялық күштерді өлшейді, содан кейін Ньютонның екінші заңын пайдаланып үдеу мәнін есептейді.
Сандық қозғалыс процессоры (DMP)
DMP - бұл гироскоп пен акселерометр сенсорларынан деректерді алу және шығыс төрттіктерден деректерді алу үшін Калман сүзгілейтін алгоритмі бар деректерді өңдеу модулі.Бұл мүмкіндік перифериялық микропроцессордың жұмыс жүктемесін едәуір азайтады және шаршаған сүзгілеуден және деректерді синтездеу процесінен аулақ болады.
Ескертулер:
Төртінші: Төртінші - қарапайым суперкомплекс нөмірлері.Күрделі сандар нақты сандардан тұрады және i ^ 2 = -1 деген қиялдағы бірлік.
MPU-6050 қайда қолданылады?
- ойыншықтар
- телефон және портативті ойын
- Қозғалыс бойынша ойын контроллері
- Blurfree ™ технологиясы (бейне / әлі де кескінді тұрақтандыру үшін)
- Air Mairign ™ технологиясы (қауіпсіздік / аутентификация үшін)
- stamcestural ™ IG ™ ™ ымдылықты тану
- денсаулық, фитнес және спорт үшін киетін датчиктер
- Қозғалыс мүмкіндігі және қолдану шеңбері
- MotionCommand ™ технологиясы (Қысқа қысқарту үшін)
- орналасқан жеріне негізделген қызметтер, қызығушылық тудыратын және өлі есептеу
- Интернетке қосылған DTV және 3D қашықтан басқару құралдары, 3D тышқандары
- Tockany ™ технологиясы («No Touch» үшін UI қосымшаларын басқару / навигация)
MPU-6050 пакеті

MPU-6050 шуын қалай азайтуға болады?
MPU-6050 шуын азайтудың келесі тәсілдерін қолдануға болады.
Калибрленген сенсорларды қолданыңыз
MPU-6050 акселерометрі мен гироскопты калибрлеу сенсорлардың өздеріне және қатесін жоюға, осылайша шуылдың әсерін азайтады.Калибрлеу процесі әдетте екі кезеңнен тұрады: статикалық калибрлеу және қозғалысты калибрлеу.
Аппараттық құралдарды сүзу процесі
MPU-6050 электр желісіне сүзгі конденсаторларын қосу сенсордағы қуат көзі шуының әсерін азайтады.Сонымен бірге, PCB орналасуы кезінде біз MPU-6050-ді жоғары жиілікті сигнал желілері және жоғары қуат бөлшектері сияқты кедергілерден аулақ болуға тырысуымыз керек.
Бағдарламалық жасақтаманы сүзгілеу
MPU-6050-ден шикізат-6050 нөмірінен алынған деректерді жинағаннан кейін, біз шуыл қозғалған кедергілерді жою үшін бастапқы деректерді алдын-ала өңдейтін бағдарламалық аралық сүзгілеу сілтемесін қоса аламыз.Жалпы қолданыстағы бағдарламалық қамтамасыздандыруды сүзу әдістері орташа сүзгілеу, орташа сүзгілеу, медианалық сүзгі, Калман сүзу және т.б.
Ішкі төмен өту сүзгісін қолданыңыз
MPU-6050-де ішкі интеграцияланған сандық төмен пасс-фильтр бар, оны оның кесілу жиілігін орнату арқылы жоғары жиілікті шуды азайту үшін пайдалануға болады.Атап айтқанда, біз сандық сүзгінің кесілген жиілік жиілігін A / D сынамаларынан туындаған жоғары жиілікті шуды жою үшін MPU-6050 конфигурациясының тіркелімін өзгерту арқылы орната аламыз.
MPU-6050-ге негізделген қозғалыс траекториясын есептеу
MPU-6050 - бұл алты осьтік акселерометр және гироскоп сенсоры, оларды объектілердің қозғалысын және көзқарасын өлшеу үшін қолдануға болады.MPU-6050-ге негізделген қозғалыс траекториясының есептеуі келесі кезеңдер бойынша жүзеге асырылуы мүмкін:
Бірінші қадам - сенсор туралы мәліметтерді оқу.Біз тиісті драйверлер мен кітапхана функцияларын қолдана отырып, MPU-6050 датчиктерінен акселерометрлік және гироскоп деректерін оқуымыз керек.Бұл деректер әдетте сандық форматта шығады, сондықтан кейбір түрлендіру және калибрлеу жұмыстары оларды физикалық қондырғылардағы нақты өлшемдерге айналдыру үшін қажет.
Екінші қадам - үдеуді есептеу.Біріншіден, бізді үдеткіштерден өңдеу керек, бұл әр осьте заттың үдеуін алу үшін.Кейіннен, әр осьте объектінің жылдамдығын және жылжуын есептеу үшін біз үдеу деректерін біріктіруіміз керек.Эйлердің әдісі немесе Lunger-Kutta әдісі сияқты сандық интеграция әдістері көбінесе бұл процесте егіншілікті есептеудің дұрыстығын қамтамасыз ету үшін қолданылады.
Үшінші қадам - бұрыштық жылдамдықты есептеу.Gyroscope деректерін пайдалану, әр осьтегі объектінің бұрыштық жылдамдығын есептеуге болады.Тағы да, бұл деректерді калибрлеу және нақты физикалық қондырғылардың бұрыштық жылдамдығын алу үшін түрлендірілуі керек.
Төртінші қадам - айналуды есептеу.Бұрыштық жылдамдық туралы деректерді біріктіру арқылы әр осьтегі нысанның айналу бұрышын есептеуге болады.Мұны бұрышты есептеу үшін Эйлер әдісі немесе Longe-Kutta әдісі сияқты сандық интеграция әдістерін қолдану арқылы жүзеге асырылуы мүмкін.
Бесінші қадам - мәліметтерді біріктіру.Біз заттың толық көзқарасы мен позициясы туралы ақпарат алу үшін акселерометрлер мен гироскоптардан деректерді біріктіреміз.Мұны төрттікке негізделген еріткіш немесе эйлер бұрышы сияқты алгоритмдерді қолдану арқылы жасауға болады.
Алтыншы қадам - нәтижелерді елестету.Біз есептелген нысандағы қозғалыс траекториясын 3D координаталар жүйесіндегі нүктелер жиынына түрлендіреміз және оны объектураны тиісті әдістермен және объектінің қозғалыс траекториясы мен қатынасы өзгерістері үшін тиісті визуализация құралдарын қолдана отырып көрсетеміз.
Жиі қойылатын сұрақтар [FAQ]
1. MPU6050 қаншалықты дәл?
Алынған нәтижелер лифт білігін және лифт өнеркәсібінің жоғары стандарттарын дұрыс өлшеуге кепілдік бере отырып, 1% -дан аз және сенімділікке ие болды.
2. MPU6050 мәліметтерін қалай оқуға болады?
MPU6050 ішкі MPU6050 регистрлерін оқып шығу үшін, шебер басталу жағдайын, содан кейін I2C құл мекен-жайына және жазудан кейін, содан кейін оқуға кететін мекен-жайын жібереді.
3. MPU6050 қай жерде қолданылады?
Денсаулық сақтау, фитнес-бақылау құрылғыларында.Дрондар мен квадкоптарда MPU6050 позицияны басқару үшін қолданылады.Роботты қолды бақылауда қолданылады.Қолдың қимылын басқару құрылғылары.
4. MPU6050 IMU?
MPU6050 IMU сенсорлық блогы жабдыққа қосылған MPU-6050 сенсорынан мәліметтерді оқиды.Блок Датчиктің осьтерінің бойымен үдеткіш, бұрыштық мөлшерлеме және температура шығады.
5. MPU6050 өңдеу дегеніміз не?
Бұл MPu6050-дің борттық процессоры, ол акселерометр мен гироскоптан шығатын деректерді біріктіреді.DMP - MPU6050-ді қолданудың кілті және кейінірек түсіндірілген.Барлық микропроцессорлар сияқты DMP бағдарламалық жасақтаманы іске қосу үшін микробағдарлама қажет.
функцияны тексеру.Ең жоғары үнемді өнімдер және ең жақсы қызмет - біздің мәңгілік міндеттеме.
Ыстық мақала
- CR2032 және CR2016 ауыстырылатын
- Mosfet: анықтама, жұмыс принципі және таңдау
- Релелік орнату және тестілеу, релелік сым схемаларын интерпретациялау
- CR2032 CR2032 vs. айырмашылығы неде
- NPN VS. PNP: Айырмашылығы неде?
- ESP32 VS STM32: қай микроконтроллер сізге жақсы?
- LM358 Қосарлы жұмыс күшейткішті жан-жақты нұсқаулық: Пиносттар, схемалар, схемалар, баламалар, пайдалы мысалдар
- CR2032 vs dl2032 vs cr2025 Салыстыру бойынша нұсқаулық
- ESP32 және ESP32-S3 айырмашылықтарын түсіну және техникалық және өнімділікті талдау
- RC сериялы тізбегінің егжей-тегжейлі талдауы
 NRF24L01 байланыс чипінің мүмкіндіктері мен қосымшаларын зерттеу
NRF24L01 байланыс чипінің мүмкіндіктері мен қосымшаларын зерттеу
2024-04-25
 MMBT3904 NPN транзисторы: оның техникалық сипаттамалары, қосымшаның толық нұсқаулығы және mmbt3904 vs. mmbt5551
MMBT3904 NPN транзисторы: оның техникалық сипаттамалары, қосымшаның толық нұсқаулығы және mmbt3904 vs. mmbt5551
2024-04-25
Ыстық бөлігінің нөмірі
 GA355ER7GB333KW01L
GA355ER7GB333KW01L GRM1555C1H110JA01D
GRM1555C1H110JA01D CGA2B2C0G1H101J050BD
CGA2B2C0G1H101J050BD C0402X5R0G152M020BC
C0402X5R0G152M020BC CC1210KKX7R9BB474
CC1210KKX7R9BB474 CC1206KKX7R5BB106
CC1206KKX7R5BB106 GRM033C80J224ME90J
GRM033C80J224ME90J CL32B106KPINNWE
CL32B106KPINNWE TPSC686K016R0200
TPSC686K016R0200 TPSB227M002R0200
TPSB227M002R0200
- T495X336M035AHE100
- AUIRF7103Q
- A42MX36-PQ208
- 5CEFA4M13I7N
- EPF10K30AQC240-2N
- W78E051C40PL
- MAX4666CSE
- SI8451BB-A-IS1
- RT0805BRD072K1L
- VI-26P-IX
- RT1206DRD07110KL
- RT0805DRE07147RL
- 7MBR25SA120B-50
- NSI45015WT1G
- TMS320F28377SPZPQ
- T491D107M010ZTAU007280
- ADUM142E0BRWZ
- UCC28230DRNT
- LTC4301LCMS8#TRPBF
- T491D156K025AT24787622
- TLV2785AID
- CY7C1383D-100BZI
- CY7C346-30NC
- GPD5080A-108A-QL231
- HA3-2544C-5
- HIN202CA
- LC51024VG-75F484C-10I
- MACH111-20JC
- QG82945PL
- SAA7708H
- TOTX141PL
- TPS54060DGQRG4
- GS8160Z36T-133
- STH108011.1
- TM7162C-NBPQ
- LFXP2-8E-5MG132C
- S4LN058A01-8030
- EPM570ZM100C5N
- VI-711554B